| Jackson Labs Technologies : Claw GPS シミュレータ | |
| 情報システム営業部 - Jackson Labs Technologies - GPSシミュレータ - シミュレーション例3の2 -お問い合わせ-資料請求 フォーム |
|
|

シミュレーション例 3-2 : 移動シミュレーション(モーション) |
| Motion Command Language で移動プログラムを書き、SimCon 上でモーションシミュレーションを実行します |
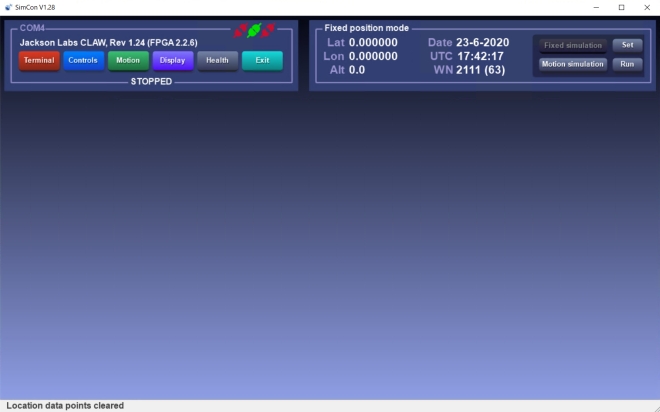
モーションシミュレーションでは、あたかも GPS 受信機の位置が3次元に移動する様子を模擬します。 どのように移動するかは Motion Command Language (MCL)で記述します。 Motion Command Language で書かれた移動プログラムのサンプル次のようなものです。テキストエディタで書くことも出来ますし、SimConの中で書くことも出来ます。ここでは次のような船舶の移動シナリオをSimConを使ってMCLのプログラムにしてみます。最後のレグは大圏航路です。 SIM:POS:MOTION:WRITE 1, DYN, 11.111, 0.150, 10.000, 0.010, 0.010 ちなみにそれぞれのコマンドの意味は以下の通りです。 Motion Command Language (MCL) については、マニュアルの 6.3.29 に詳しい説明があります。 MCL ではシミュレーション中の動きを、現在地、力学的制限値、加減速、加加速度、昇降、指示方位で表します。結果、指定した制限範囲内の加速度で方向 や高度を変えながら移動します。 それぞれのコマンドは以下の通りです。 DYNamics (6.3.29.1) は全ての動きに影響しますから最初の行に書きます。書式と単位は: REFerence (6.3.29.2) は始点、速度、方向 を指定します。書式と単位は; 以上2行は必須です STRaight (6.3.29.3) は進行方位を保った水平飛行の時間と直線コースか大圏コースを指定します。書式と単位は: ACCELerate (6.3.29.4) は期間と速度の変化分を指定します。書式と単位は: CLIMB (6.3.29.6) は現在の進行方位と速度からの上昇ないし下降を指定します。書式と単位は: TURN (6.3.29.5) は現在の水平速度における進行方位の変更と横方向の加速度を指定します。書式と単位は: HALT (6.3.29.10) は現在の速度と進行方向からDYNコマンドで指定した制限内で到達する到達点です。書式と単位は: GOTO (6.3.29.11) は指定する行番号にジャンプすることで、無限ループを作ります。書式は: END (6.3.29.12) は Motion Command のシーケンスの終わり指定します。書式は: この例には使われていない、加速とターンの組み合わせ ACCEL-TURN や、ターンと上昇の組み合わせ TURN-CLIMBや、通過点を指定する Waypoint WAYPT が用意されています。 SimCon を起動します2つのヘッダーが表示されています。 SimCon は最後の設定を覚えていて、起動時に最後の状態を復元します。 左側にある5つのボタンで各機能パネルにアクセスします。 5つのパネルを同時に表示できます。 Exit ボタンで終了します。 暗い色のボタンはその機能パネルが有効になっていることを意味します。 右側のヘッダーはステータスヘッダーと呼ばれ、その表示内容は状態により変化します。 以下の状態では、どの機能パネルも選択されておらず、SimCom は COM4 で Claw GPS シミュレーター に接続しており、シミュレーションは STOPPED すなわち停止しています。 |
Motion ボタンをクリック、Motion プログラムを LoadMotion パネルが表示されます。
Motion パネルの Load ボタンをクリックして、MCLで記述したプログラムファイルを選択して「開く」ボタンをクリックすると Motion Command Language で書かれたプログラムが読み込まれます。読み込んだプログラムは Motion パネルで一覧したり変更したりできます。 このパネルを使いゼロから Motion をプログラムすることもできます。 DYN に移動体の情報を入力します。 Max lin speed は最大直進速度 それぞれを単位に注意しながら入力すると DYN のパラメーター入力は終了です。 値は後から変更することが出来ます。 Display ボタンをクリック、Motion preview タブをクリック次に REF に位置情報と現在の移動方位と移動速度を与えるには、DYN 同様に Motion ペインに数字を直接与えることも出来ますが、Display ペインを使うとGoogle地図を使って位置情報を入力できます。もちろん Motion ペインで直接数値を入力してもかまいません。 Motion preview のGoogle地図のREFに入力する地点をクリックします。その地点が画面の中央に表示され+印が表示されます。この状態で Motion ペインの2行目 REF にある Mapボタンをクリックします。
この状態で Motion ペインの2行目 REF にある(スクロールバーで移動) Mapボタンをクリックすると+印の位置の座標が入力されます。以下の3項目は手入力します。
Alt はエリプソイドからの高さ:東京の海面なら 35.5m Motion ペインの右端にある下矢印をクリックして3行目を表示させます。移動を定義します。
コマンドの選択 3行目を入力します。コマンドはプルダウンから選択できます。コマンドの説明が一番下に表示されます。ここでは直進コマンド STR(STRaight 直進) を選択しています。 パラメータとして Duration に直進を続ける時間、Path は直進 C か大圏コース G かを選択します。 三角で行を上下に移動できます。
同じ要領で一行毎に入力していきます。 プログラムの保存Save ボタンを押すと、作成したプログラムを任意のディレクトリに保存できます。 プログラムの読み込みLoad ボタンを押すと、保存したプログラムを読み込むことが出来ます。また、任意のテキストエディタで作成したMCLプログラムを読み込むこともできます。 テキストエディタの起動Edit ボタンを押すとテキストエディタ(Windowsのメモ帳)が起動します。テキストエディタの中でプログラムを修正変更することもできます。
Motion preview によるシミュレーション Motion previewには MCL をシミュレーション実行する機能が備わっており、Claw GPS Simulator が手元になくても移動プログラムの実行結果を地図上(インターネット接続があるとき)に表示できます。右上には 現在実行中のプログラムの行番号、その行番号の完了率、座標や高度が表示されます。 実行速度を x10 や x100 に加速することもできます。
このように Motion Command Language を使い、任意の三次元の移動経路を設定し、任意の日時でGPSシミュレーションを実行できます。実行方法についてはこちらを参照ください。 実行する際には、GPS衛星を自動配置することも出来ますし(通常これで十分です)、RINEX書式のEphemerisを読み込ませて実際のGPS衛星の配置を再現することも出来ます。 もう一つ例を置きます。 SIM:POS:MOTION:WRITE 1, DYN, 30.000, 1.000, 10.000, 1.000, 10.000 以上 |







お問い合わせはこちらまで
株式会社 昌新 産業機器営業部
関連製品: GPS 周波数標準とタイムサーバー
関連製品: GPS 信号分配器
関連製品: 光ファイバー GPS 信号延長器