| Jackson Labs Technologies : Claw GPS シミュレータ | |
| 情報システム営業部 - Jackson Labs Technologies - GPSシミュレータ -シミュレーション例2の2 -お問い合わせ-資料請求 フォーム |
|
|

シミュレーション例 2 : 任意の固定位置 うるう秒挿入 |
||
| 位置固定 北緯 35度 東経 135度 GPS高度 60m |
||
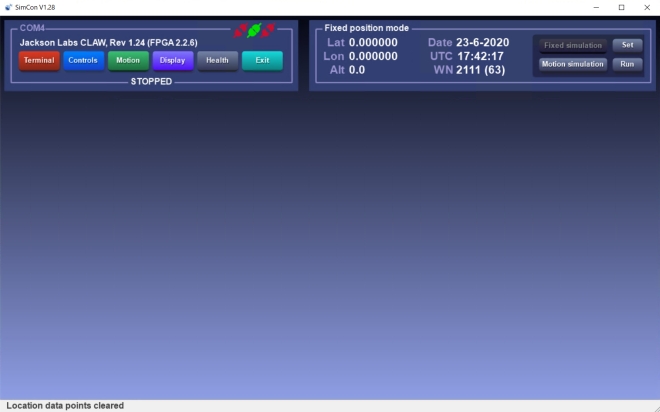
シミュレーション例1をお読みになってからシミュレーション例2をお読みになることをおすすめします。 ここでは SimCon アプリケーションを使っていますが、CLIでも同じように設定起動操作できます。このシミュレーションでは、GPS 受信機の位置が固定している Fixed simulation を実行します。 シミュレーションの設定はシミュレーション例 1 と概ね変わりません。 うるう秒は UTC の6月30日か12月31日に挿入されますが、3月31日と9月30日にも挿入できることになっています。 このシミュレーションでは 12月31日 の 23時59分59秒 UTC の次にうるう秒を挿入します。 日本時間では 1月1日の午前 8時59分59秒です。 既に GPS 受信機の座標が指定してあるのなら、以下のコマンドを直接打ち込むだけで「うるう秒挿入」のシミュレーションが始まります。 SIM:MODE MANUAL では、上記コマンドと同じ設定を SimCon アプリケーションを使って設定します。 SimCon を起動します2つのヘッダーが表示されています。 SimCon は最後の設定を覚えていて、起動時に最後の状態を復元します。 左側にある5つのボタンで各機能パネルにアクセスします。 5つのパネルを同時に表示できます。 Exit ボタンで終了します。 暗い色のボタンはその機能パネルが有効になっていることを意味します。 右側のヘッダーはステータスヘッダーと呼ばれ、その表示内容は状態により変化します。ステータスヘッダーにはいくつかのボタンが用意されていますが、今回は使いません。 以下の状態では、どの機能パネルも選択されておらず、SimCom は COM4 で Claw GPS シミュレーター に接続しており、シミュレーションは STOPPED すなわち停止しています。 |
||
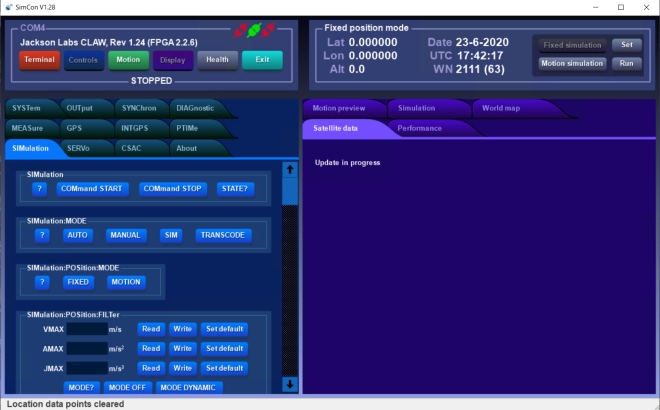
Controls とDisplayボタンをクリックControls と Display パネルが表示されます。 どちらにも複数のタブがあります。 パネルは5つ全て開くこともでき、また画面全体に大きくすることもできます。 Controls パネルは Motion と Display パネルに関する SCPI コマンドを発行してくれる GUI です。 また Terminal パネルに SCPI コマンドを直接手入力する際の参考にできます。 Controls パネルにはいくつものタブがありますが、これらはサブシステムに分かれた階層構造を持つ SCPI コマンドのサブシステムの最上位に紐付いています。それゆえ SCPI サブシステムタブと呼ばれます。 ファームウェアノ更新も Controls タブから行います。 SCPI コマンドの詳細についてはマニュアル 6 章 を参照ください。 Controls パネルについては マニュアル 4.8 The Controls Panel も参照ください。
SIMulation の基本設定
|
||
SIMulation タブでパラメータの設定 |
||
|
||
シミュレーション日時の設定 |
||
|
||
シミュレーションを実行します |
||
|
||
シミュレーションの進行とうるう秒挿入 |
||
|
||
このように、とても簡単にうるう秒の GPS シミュレーションを実行できます。
|






お問い合わせはこちらまで
株式会社 昌新 産業機器営業部
関連製品: GPS 周波数標準とタイムサーバー
関連製品: GPS 信号分配器
関連製品: 光ファイバー GPS 信号延長器