シミュレーション例 1 : 任意の固定位置 任意の日時から手動開始 |
| 位置固定 北緯 35度 東経 135度 GPS高度 60m
2020年12月31日0時0分 からのシミュレーシ
を手動で開始 |
ここでは SimCon アプリケーションを使っていますが、CLIでも同じように設定起動操作できます。このシミュレーションでは、GPS 受信機の位置が固定している Fixed simulation を実行します。 これとは別に GPS 受信機が移動する Motion simulation がありますがここでは触れません。
このシナリオは以下のコマンドを直接打ち込むだけでパラメータの設定とシミュレーションの開始が行われます。ここで設定されたパラメータはCLAWに保存され、以降はシミュレーションの停止と再開コマンドだけで同じシミュレーションを繰り返します。
SIM:MODE MANUAL
SIM:POS:MODE FIXED
SIM:POS:LLH 35.000,139.000,80.0
SIM:TIME:MODE ASSIGNED
SIM:TIME:START:TIME 23,50,00
SIM:TIME:START:DATE 2020,12,31
SIM:COMMAND START
シミュレーションは停止するまで続きます。シミュレーションを停止するには:
SIM:COMMAND STOP
再び実行するには:
SIM:COMMAND START
出力を-110dBmにするには:
OUT:POW -110
では、上記コマンドと同じ設定を SimCon アプリケーションを使って設定します。
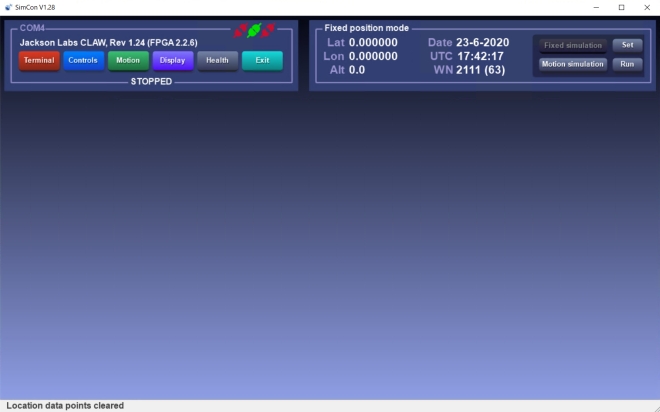
SimCon を起動します
2つのヘッダーが表示されています。 SimCon は最後の設定を覚えていて、起動時に最後の状態を復元します。
左側にある5つのボタンで各機能パネルにアクセスします。 5つのパネルを同時に表示できます。 Exit ボタンで終了します。 暗い色のボタンはその機能パネルが有効になっていることを意味します。
右側のヘッダーはステータスヘッダーと呼ばれ、その表示内容は状態により変化します。ステータスヘッダーにはいくつかのボタンが用意されていますが、今回は使いません。
以下の状態では、どの機能パネルも選択されておらず、SimCom は COM4 で Claw GPS シミュレーター に接続しており、シミュレーションは STOPPED すなわち停止しています。
右側は Fixed simulation ボタンが暗転していて、Fixed position mode が選択されていることを示しています。 |
Controls とDisplayボタンをクリック
Controls と Display パネルが表示されます。 どちらにも複数のタブがあります。
オプションとして、Terminal パネルも表示しておくと Claw GPS シミュレーターと SimCon とのやり取りを見たり、直接 SCPI コマンドを打ち込んだり、ファイルを Claw GPS シミュレーターにアップロードしたりできます。多くの用途には Terminal パネルは不要です。
パネルは5つ全て開くこともでき、また画面全体に大きくすることもできます。
Controls パネルは Motion と Display パネルに関する SCPI コマンドを発行してくれる GUI です。 また Terminal パネルに SCPI コマンドを直接手入力する際の参考にできます。
Controls パネルにはいくつものタブがありますが、これらはサブシステムに分かれた階層構造を持つ SCPI コマンドのサブシステムの最上位に紐付いています。それゆえ SCPI サブシステムタブと呼ばれます。 ファームウェアノ更新も Controls タブから行います。 SCPI コマンドの詳細についてはマニュアル 6 章 を参照ください。
Controls パネルについては マニュアル 4.8 The Controls Panel も参照ください。
SIMulation の基本設定
 |
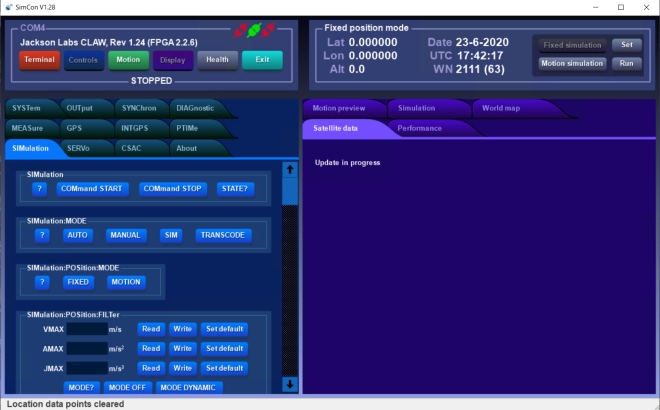
暗転した Control ボタン と Display ボタン はそれらパネルが表示されていることを意味します。 暗転していない場合はそれらをクリックしてください。
左ヘッダーの STOPPED はシミュレーションが停止していることを意味します。
SIMulation タブをクリックしてシミュレーションのパラメータを設定します。
SIMulation:MODE の MANUAL ボタンをクリックします
MANUAL は電源オン時に自動起動せず、SIM:COM START コマンドが発行されたときに起動するモードです。
[ SCPIコマンド SIM:MODE MANUAL に相当 ] (マニュアル 6.3.2 参照)
SIMulation:POSition:MODE の FIXED ボタンをクリックします
FIXED は位置固定(移動しない)モードです。
[ SCPIコマンド SIM:POS:MODE FIXED に相当 ] (マニュアル 6.3.8 参照) |
|
SIMulation タブでパラメータの設定 |
 |
このタブの下にたどると SIMulation:POSition:LLH (マニュアル 6.3.9) があります。
ここにLat 緯度、 Lon 経度、 Alt 高度 を入力します。
現在 Claw GPS シミュレータが持っている値は、Get position ボタンをクリックすると表示されます。
Factory default position ボタンをクリックすると、工場初期値が表示されます。
緯度は、北緯は正の値、南緯は負の値で入力します。経度を入力する際は、東経は正の値、西経は負の値で入力します。高度は GPS 高度(地球楕円体高)です。楕円体高=標高+ジオイド高ですから、標高にジオイド高を加えた高度を与えます。 東京付近では海面標高に37mを加えた値がGPS高度になります。 ジオイド高は国土地理院の計算サイトで知ることができます。
座標を入力し、Set position ボタンをクリックするとパラメータが Claw GPS シミュレータに記憶されます。
[ SCPI コマンドの SIM:POS:LLH 35.000,139.000,80.0 に相当 ]
|
|
シミュレーション日時の設定 |
 |
このタブをさらに下にたどり
SIMulation:TIME:MODE (マニュアル 6.3.46 参照)
の ASSIGNed ボタンをクリックします。
[ SCPI コマンド SIM:TIME:MODE ASSIGNED に相当 ]
SIMulation:TIME:START:TIME (マニュアル 6.3.47 参照)
にシミュレーション開始時の時刻をUTCで入力して、Write ボタンをクリックすると値は Claw GPS シミュレーターに記憶されます。
[ SCPI コマンド SIM:START:TIME 23,50,0.000 に相当 ]
Read ボタンをクリックすると Claw GPS シミュレーターに記憶している値が表示され、Use current time ボタンをクリックすると、PCの持つ現在時刻が UTC でセットされますので、現在時刻からのシミュレーションを行うのであれば Use curren time ボタンをクリックして、Write ボタンをクリックするだけで現在の時刻が Claw に設定されます。
SIMulation:TIME:START:DATE (マニュアル 6.3.48 参照)
にシミュレーションを開始するUTC日付を入力して、Write ボタンをクリックすると値は Claw GPS シミュレーターに記憶されます。
[ SCPI コマンド SIM:START:DATE 2020,12,31 に相当 ]
Read ボタンをクリックすると Claw GPS シミュレーターに記録されている値が表示され、Use current date ボタンをクリックすると、PCの持つ今日の日付がセットされますので、現在の日付からシミュレーションを行うのであれば Use current date ボタンをクリックして、Write ボタンをクリックするだけで今日の日付が Claw に設定されます。
これでシミュレーション開始時の日付時刻が登録されました。 |
|
シミュレーションを実行します |
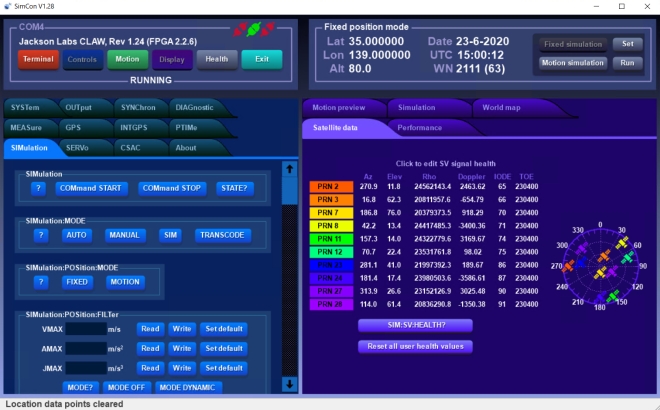
SIMulation タブを最上部まで戻って COMand START ボタンをクリックすると シミュレーションが開始されます。
右側の Display パネルの Satellite data タブを選択すると視野に入っている衛星が動いている様子を見ることができます。
Display パネルの詳細についてはマニュアルの 4.9 The Display Panel を参照ください。
|
右側で Simulation タブをクリックすると地図(インターネット接続が必要)とMFDが表示されます。
左上の Control ボタンを押して Control パネルを消すと Display パネルが大きく表示されます 。
Clear track ボタンをクリックしてトラックを消去し、Locate ボタンをクリックすると 設定した座標の位置が地図に点として表示されます。Zoom in Zoom out で地図を拡大縮小できます。 今回のシミュレーションでは位置は不動ですから計器や位置が動くことはなく、時刻と衛星だけが動いていきます。 Motion simulation を実行すると、地図上に軌跡が表示され、MFD も動作します。

|
ワールドマップタブ
ワールドマップタブを開くと衛星(SV)が自動配置された様子がわかります。+印が観測点であり、その可視範囲に適切にGPS衛星が配置されています。点線は10分ごとに記録された過去 24 時間の衛星の軌跡です。 |
 |
サテライトデータタブ
このタブには左側の表に衛星(SV)のPRN番号、方位、仰角、距離、L1のドップラーシフト、IODE(Issue Of Data Ephemeris)、TOE (Time of Epoch)秒が表示されています。
Terminal パネルも表示しておいて、SIM:SV:HEALTH? ボタンをクリックすると現在のユーザーが設定による Heath ビットマスクが表示されます。 Reset all user health values ボタンをクリックすると全ての衛星のヘルスビットマスク値は初期値 (AND=0xFF,OR=0x00) にリセットされます。 |
 |
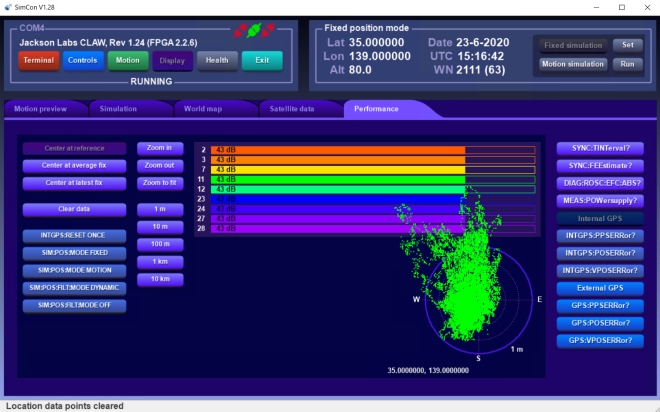
パフォーマンスタブ
このタブにはいくつものボタンがあって、内蔵する GPS 受信機(Internal GPS)や外付けした GPS 受信機(External GPS)の性能要素を表示します。
Display ペインの Perfomance タブを選択し、Internal GPS ボタンを押すと内蔵GPS受信機による位置評定の様子が表示されます
ポーラーチャートのスケールは Zoom や 1m 10m ボタンで選択します。横バーグラフは SV 毎の C/N を示しています。ポーラープロットは内蔵GPS受信機で位置評定した結果の内、直近の 86400 回分を示したデビエーションマップです。
詳しくはマニュアルの 4.9.4 Performance tab を参照ください。
内蔵 GPS 受信機「INTGPS サブシステム」の詳細についてはマニュアルの 6.11.1 を参照ください。
Internal GPS |
 |
INTGPS:PPSERRor?

|
| |
Claw GPS シミュレーターを GPS 受信機に接続する前に出力を確認 |
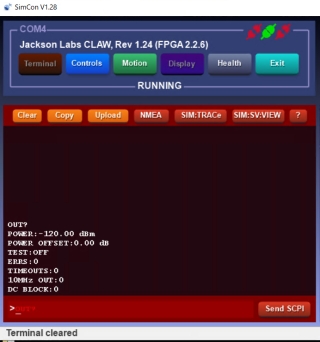 |
Terminal ボタンをクリックしてターミナルパネルを開きます。一番下の入力欄(>)にコマンド OUT? を入力して Send SCPI ボタンをクリックすると出力関係の情報が表示されます。 この例では:
POWER:-120.00 dBm <- 可変範囲は -145dBm から -100dBm
POWER OFFSET:0.00 dB <- 出力オフセット なし (外部増幅器や外部減衰器なし)
TEST:OFF <- テスト信号モード OFF
ERRS:0
TIMEOUTS:0
10MHz OUT:0 <- 10MHz 出力 OFF
DC BLOCK:0 <- DCブロック OFF (GPSアンテナシミュレーション抵抗が入る)
現在、信号レベルは -120 dBm になっています。 |
|
出力レベルを変更します |
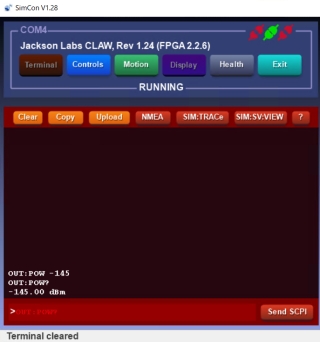 |
Terminal ターミナルパネルの一番下の入力欄(>)にコマンド を入力して出力を変更します:
コマンド: OUT:POW -145
コマンド: OUT:POW?
-145.00 dBm に変更されました。
これが外付減衰器を使わない時の信号レベルの下限値です。 |
|
出力レベルを変更します (外付アッテネーターを取り付けます) |
 |
外付 20 dB 減衰器を取り付けて、信号レベルを 20dB 下げます。 外付減衰器を GPS 受信機と Claw GPS シミュレータの間に挿入する際は、必ず GPS 受信機側に付属品の DC ブロック、その次に減衰器の順に取り付けて、GPS 受信機の直流出力を DC ブロックでカットしてください。 DC ブロックと減衰器を取り付けたら Claw GPS シミュレータに減衰器の減衰量をオフセット値として設定します;
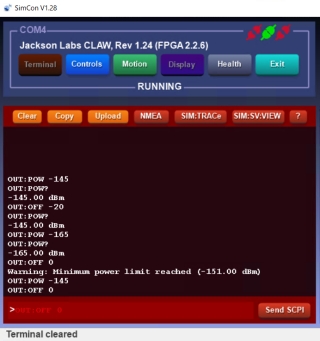
コマンド: OUT:OFF -20
Claw GPS シミュレーターの出力は自動的に 20 dB 増加して、信号レベルは設定値である -145 dBm のまま保たれます。 これで可変範囲は -165 dBm から -120 dBm になりました。 信号レベルを -165 dBm に下げてみます。
コマンド: OUT:POW -165
コマンド: OUT:POW?
-165 dBm 出力になりました。 |
|
出力レベルを変更します (外付アッテネーターを外します) |
|
20 dB アッテネータを取り外す時は、取り外した後の出力レベルを勘案する必要があります。 OUT:POW が -165dBm に設定してあるときに、
コマンド: OUT:OFF -20
すると、減衰器なしでは対応できない出力レベルになるため Warning: Minimum power limit reached の警告が表示されます。
コマンド: OUT:POW -145
により出力を外付減衰器なしの可変範囲内(-145 dBm から -100 dBm)に設定してから
コマンド: OUT:OFF 0
して、外付け減衰器なしに変更すれば Warning は出ません。 |
|
|
このように、非常に簡単に任意の場所、任意の日時の GPS シミュレーションを実行し、また信号レベルを変更することができます。
|
